
Specifications
WidowX AI
Overall Specifications
|
Specification |
Value |
|---|---|
|
Degrees of Freedom |
6 |
|
Payload Capacity |
1.5 kg |
|
Weight |
4kg |
|
Reach |
0.769m |
|
Nominal Voltage |
24 V |
|
Peak Current |
15 A |
|
Communication |
UDP over Ethernet |
Joint Limits
|
Joint |
Min Position [rad (deg)] |
Max Position [rad (deg)] |
Velocity [rad/s (deg/s)] |
Effort [N*m] |
|---|---|---|---|---|
|
Joint 0 |
-3.1416 (-180) |
3.1416 (180) |
6.2832 (360) |
27 |
|
Joint 1 |
0 (0) |
3.1416 (180) |
6.2832 (360) |
27 |
|
Joint 2 |
0 (0) |
2.3562 (135) |
6.2832 (360) |
27 |
|
Joint 3 |
-1.5708 (-90) |
1.5708 (90) |
9.4248 (540) |
7 |
|
Joint 4 |
-1.5708 (-90) |
1.5708 (90) |
9.4248 (540) |
7 |
|
Joint 5 |
-3.1416 (-180) |
3.1416 (180) |
9.4248 (540) |
7 |
|
Specification |
Value |
|---|---|
|
Max Finger Displacement [m] |
0.04 |
|
Max Gripping Force [N] |
100 |
Note
These effort limits are nominal values. The actual limits are computed with the following formula:
where is the nominal effort limit of a joint, is the effort correction factor of this joint , and is the actual effort limit of this joint.
The effort corrections can be retrieved with trossen_arm::TrossenArmDriver::get_effort_corrections().
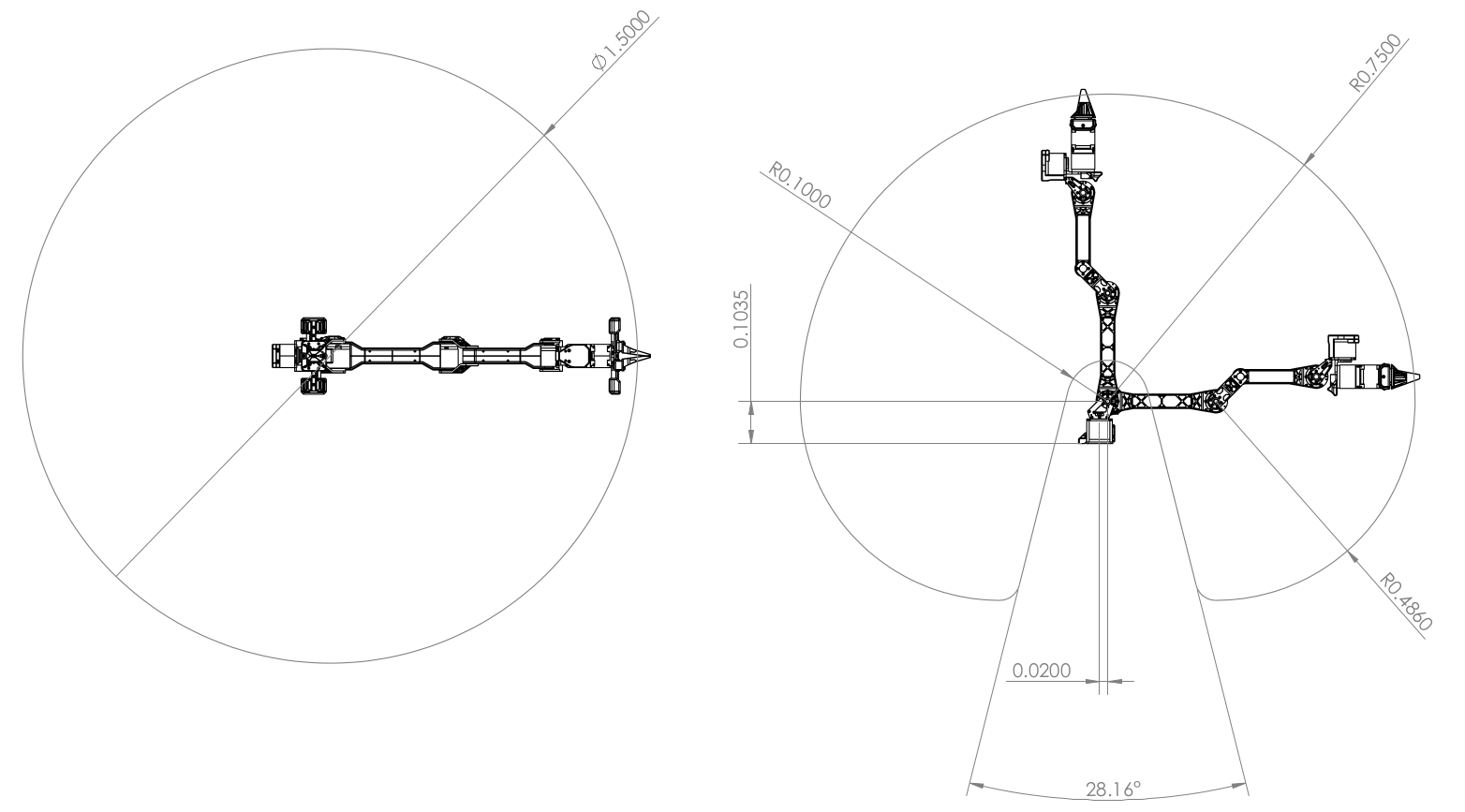
Workspace